pybullet-planning源码解析
我们尝试来阅读一下pybullet-planning中和ik、planning相关的源码。
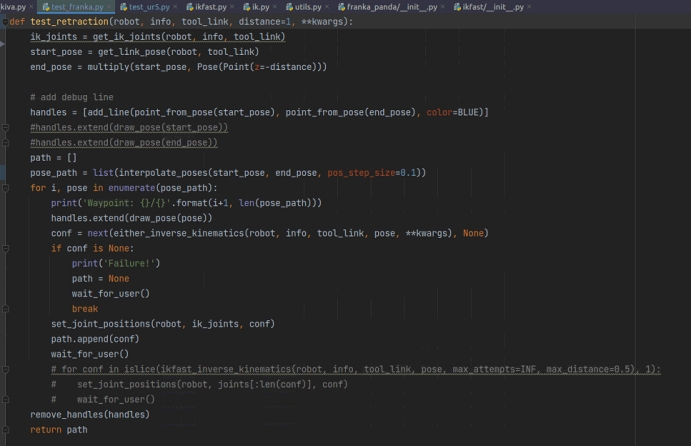
我们尝试从test_franka.py入手
首先是start_pose是起始的关于tool_link的6D位姿,也就是得到pos, orn
同理,end_pose是对于start_pose施加了一个相对位移z=-distance(1m)以后的位置
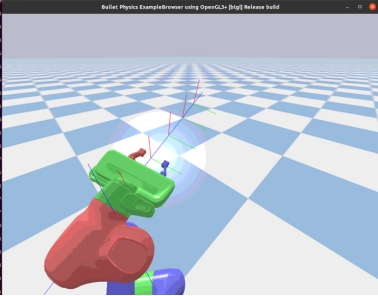
我们可以发现,每一次移动的位置确实是沿着z轴相对位置后退0.1m(因为我们分了十步去处理后退1m的最终目标)
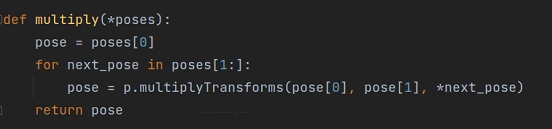
分析multiply的源码,有比较陌生的poses参数,单个的意思其实就是按照数组形式处理传入的不定长个参数
术语表:
solve joints: 需要用来求解ik的关节。
free joints: 需要在ik计算前指定的关节,这些值在运行时是已知的,但是在ik创建的时候是未知。(not known at IK generation time)
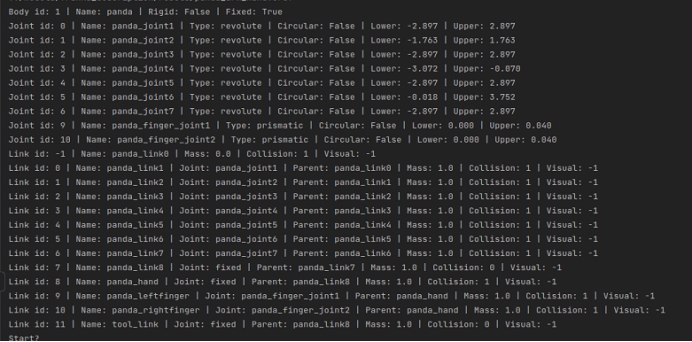
以panda_franka为例,传入的ikfast_info为IKFastInfo(module_name=’franla_panda.ikfast_panda_arm’, base_link=’panda_link0’, ee_link=’panda_link8’, free_joints=[‘panda_joint7’])。因为panda是7个自由度的机器人,所以需要指定一个joint为free joint。
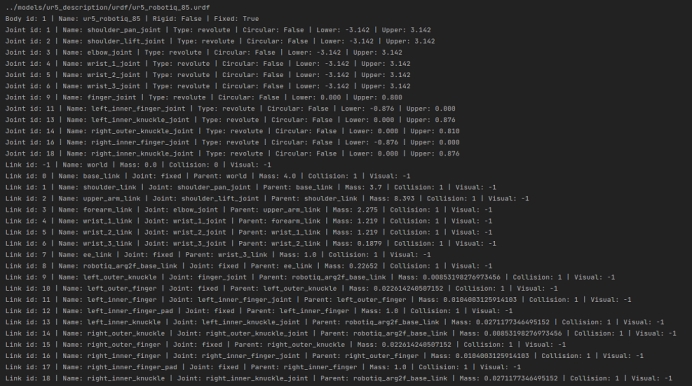
以UR5为例,传入的infast_info为IKFastInfo(module_name=’ur5.ikfast_ur5_arm’, base_link=’base_link’, ee_link=’ee_link’, free_joints=[])。因为UR5是6个自由度的机器人,所以不需要指定free joint。
link_from_name:根据name得到link id
换句话说,对于一个link,施加get_ordered_ancesters以后可以得到包括这个link在内的其祖先link
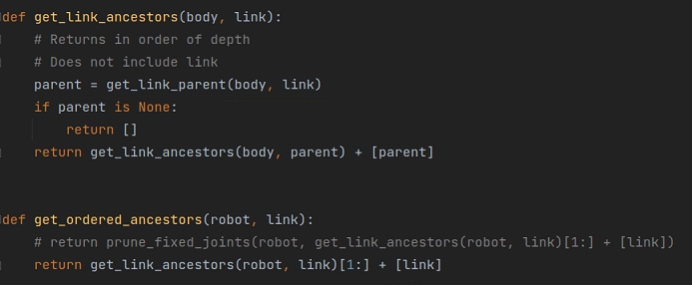
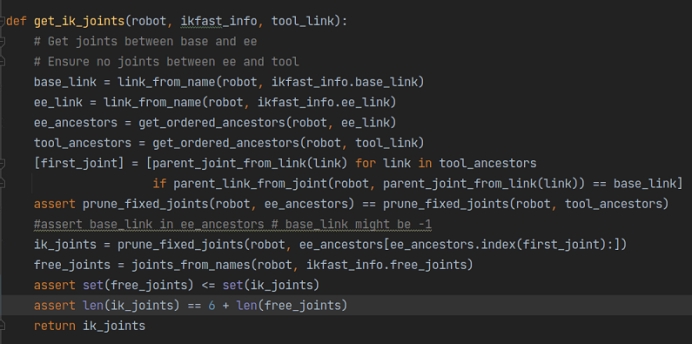
以panda为例:
get_ordered_ancestors(panda, ee_link):[0, 1, 2, 3, 4, 5, 6, 7]
get_ordered_ancesters(panda, tool_link):[0, 1, 2, 3, 4, 5, 6, 7, 8]
first_joint:连接了base_link的joint
prune_fixed_joints:去除掉固定的joint以后,需要纳入计算的joint。
ik_joints:[0, 1, 2, 3, 4, 5, 6]
free_joints:[6]
assert set(free_joints) <= set(ik_joints):保证需要设置的free_joint包含在ik_joints内。
assert len(ik_joints) == 6 + len(free_joints):保证剔除掉free_joints后为6个自由度,比如7自由度关节的机械臂需要1个free_joint,6自由度关节的机械臂需要0个free_joint。

difference_fn是一个求差值的函数,对于普通的joint来说,是直接两个参数相减,对于circular joint会有一些特殊的计算方式,但是circular joint在代码中的定义是upper limit < lower limit的情况,并且google也并没有找到什么有用的信息,考虑到我们目前使用的机器人都没有circular joint,就直接当做两个值相减就可以了。
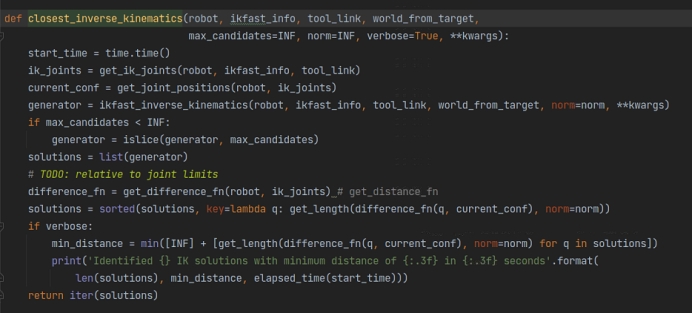
get_length函数就是单纯的求n-范数,范数通过norm参数传进去。
其实closet_inverse_kinematics的后半部分只是在对求出来的解进行排序,找到一个各关节位姿变化的距离最小的解输出。而前半部分是通过generator = ikfast_inverse_kinematics(…..)求解得到了所有的可行解。
在研究ikfast_inverse_kinematics之前,我们先来搞懂interval_generator

Np.random.uniform从一个均匀分布[0,1)中随机采样,获得d个数据
Halton sequence:Halton序列是一种为数值方法(如蒙特卡洛模拟算法)产生顶点的系列生成算法。虽然这些序列是以确定的方法算出来的,但它们的偏差很小。也就是说,在大多数情况下这些序列可以看成是随机的。Halton系列于1960年提出,当时是作为quasi-random 数字序列的一个例子。
所以unit_generator是从均匀分布[0,1)中采样d个数据。而在interval_generator这个函数中,也就是随机采样d个0~1之间的权重,传入convex_conbination中。

所以其实就是在lower和upper之间随机取d组点,如果joint lower limit = joint upper limit,那么自然就直接取相等。
所以,调用interval_generator会返回一个满足条件的joints的各个角度。
接下来,我们再来尝试搞懂ikfast_inverse_kinematics
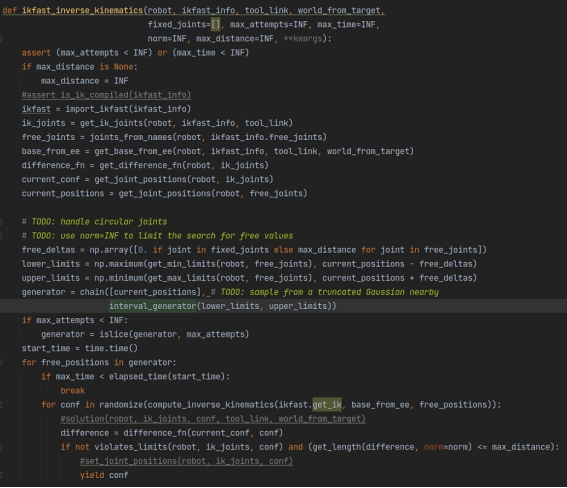
\1. 首先import_ikfast函数会根据我们传入的ikfast_info去import对应机器人的cpp编译出来的模组,每次需要使用新的机器人时,都要准备好这件事情。
\2. ik_joints和free_joints相对比较容易理解,上文中有提到过这件事情。
\3. lower_limits和upper_limits就是joint的上下界,free_deltas不详。
\4. Islice(generator, max_attempts),迭代器generator生成max_attempt个proposal后结束
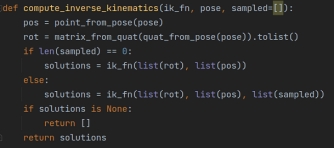
所以generator迭代器将原先的joint pose和随机数采样得到的joint pose可行解传入compute_inverse_kinematics中,会继续被传入到每个机械臂特有的ikfast cpp中,具体作用不详,在ur5的ikfast代码中,似乎是在某些条件下会使用采样数据作为某个joint的值。
在ikfast cpp的源码中,我们可以看到这样的表述Computes all IK solutions given a end effector coordinates and the free joints. pfree is an array specifying the free joints of the chain. 换句话说,我们传入的采样得到的sampled参数实际上是指定了对应free joint的本次求解中的值,因为free joint是需要我们指定的,这无可厚非。
\5. 在传入对应参数以后,满足条件的解会yield出来,所以其实ikfast_inverse_kinematics生成了一个产生对应configuration下的ik解的迭代器。solutions = list(generator),也就是把这些解都放进list中,因为实现传入的时候,我们保证了要么max_attempts不为INF,要么max_times不为INF,所以不会出现generator会成为一个无限长的迭代器的情况,如果max_times设大了,可能会影响实时性。
接下来,我们来考察pybullet_inverse_kinematics函数。
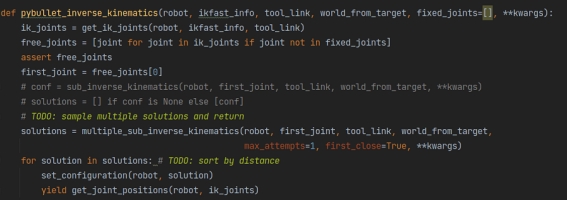
具体流程是调用multiple_sub_inverse_kinematics,然后最后可以得到一堆解。
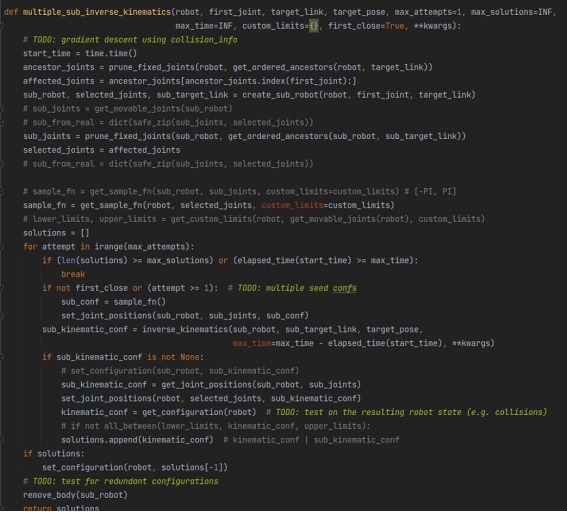
它实现逻辑是这样的:
每次需要计算ik的时候,sample一些在各个joint limit范围内的整个机械臂的姿态,创建对应的subrobot,然后subrobot会以ik target pose为目标,迭代式地求解这个ik,也就是求解一次ik,set到对应位置,再求解ik……,迭代约200次,然后最后check最终的位姿和ik的target位姿的差值是不是小于某个阈值,如果小于则成功。
其中sub_robot其实就是在Pybullet环境中创建一个不考虑碰撞的、不可见的、相同pos的robot,只用来计算ik,在计算完成后,就会把sub_robot删除。
Motion-planning
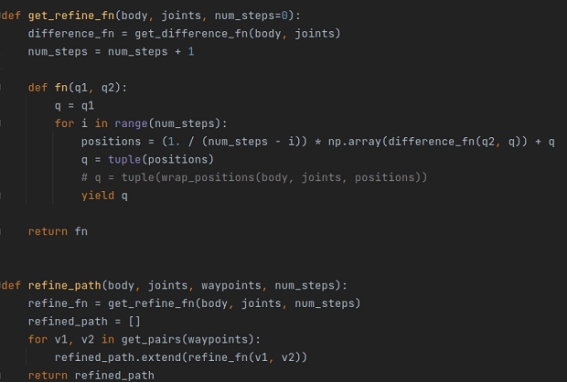
首先是refine_path这个函数,这个函数比较简单,也就是传入一组waypoint(每个waypoint是joint的一组值),refine_path会在每相邻两个waypoint中插入num_steps个中间点,作为新的path。
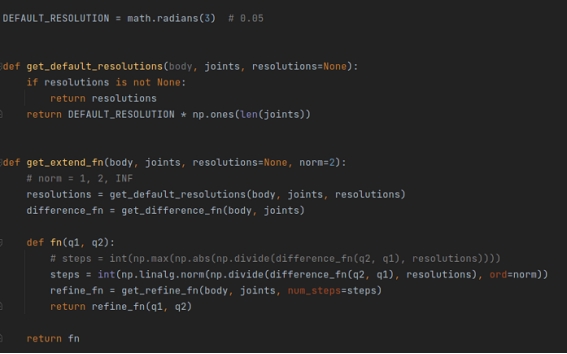
get_extend_fn(resolution)这个函数也是返回一个函数是根据resolutions确定在两个waypoint之间需要插值几个waypoint点,resolution默认值为3度,也就是0.05弧度。然后调用之前所提到的get_refine_fn函数。resolution对于不同的joint可以设置不同的joint。
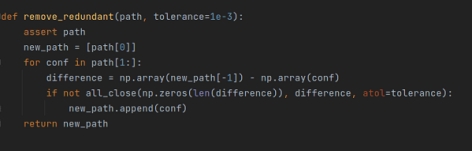
remove_redundant其实就是把位姿path中太近(2范数小于1e-3)的点移除。
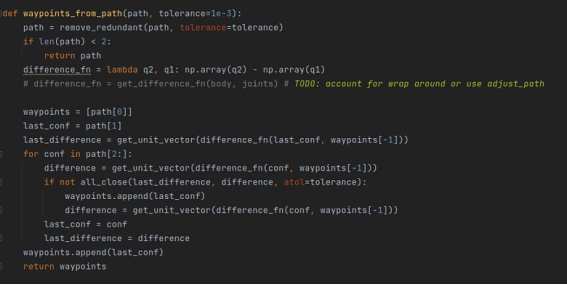
模拟一下这个情况,首先把path[0]加入waypoint中,然后考察下一个path[i]。对于对于相邻的两次,考察相邻path[i - 1]->path[i]和path[i]->path[i+1]这两个向量,我们规范化后考察其方向,如果方向一致的话就不再加到waypoints中。所以相对于path是path中一些平均相距为resolution的位姿。
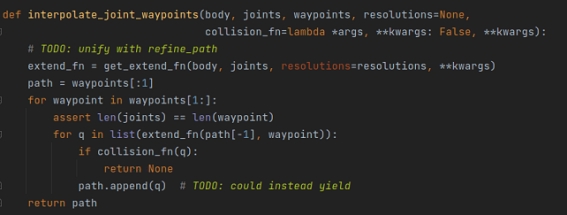
interpolate_joint_waypoints,也就是对给定的waypoint,通过不同joint的resolution来插值得到一个均匀resolution的waypoints的路径。并且如果其中插值的路径中检测到了碰撞,直接输出空路径。
其实也是带了碰撞检测的interpolate_joint_waypoint。碰撞检测发生在枚举waypoint的需要插值的节点上。注意和interpolate_joint_waypoints中碰撞检测的对象的区分(一个是需要插值的节点,一个是插值后的新增节点)。
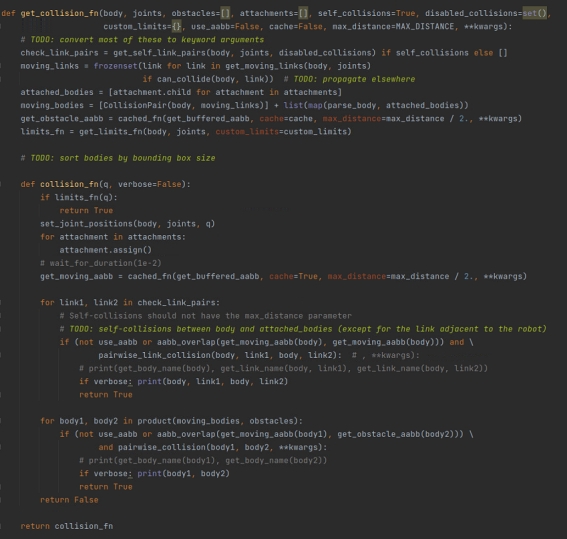
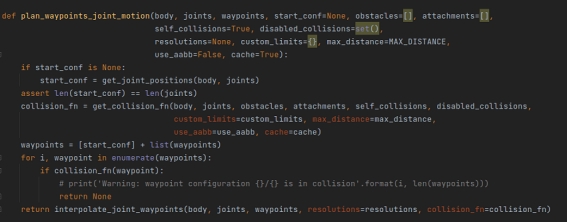
可以看到机器学习分为两个阶段,比如倒数第三段,check_link_pair循环中,就是判断自己的link之间的碰撞,也就是self-collision。在倒数第二段,其实就是check我们的body和obstacles之间的collision。
关于这个函数中提供的碰撞检测,有aabb碰撞检测和pair_wise_collision碰撞检测。Aabb比较容易理解,而pair_wise_collision主要是通过枚举需要判断的两个物体之间的笛卡尔积,分别通过p.getClosestPoints是否等于0来判断。
pybullet-planning源码解析