pybind11初探
最近项目过程中经常遇到底层为C++代码的情况,作为一个契机,详尽地研究一下pybind11。
虽然无关紧要,但是很在意的问题是11这个数字是哪来的,因为pybind11的介绍是 Seamless operability between C++11 and Python,据称其主要内核代码使用了C++11的语言特性,如匿名函数、元组等。

如上图所示,这是符合pybind11编程要求的c++代码。
图 1 https://zhuanlan.zhihu.com/p/92120645
根据pybind11官网教程,可以使用如下代码进行编译:
c++ -O3 -Wall -shared -std=c++11 -fPIC $(python3 -m pybind11 –includes) example.cpp -o example$(python3-config –extension-suffix)
-Wall 这个编译选项会强制输出所有警告,用于调试。
-o output_filename 确定输出文件的名称为output_filename。同时这个名称不能和源文件同名。如果不给出这个选项,gcc就给出默认的可执行文件a.out。
-fPIC 生成位置无关代码。
-I/home/baochen/anaconda3/include/python3.8 -I/home/baochen/anaconda3/lib/python3.8/site-packages/pybind11/include
.cpython-38-x86_64-linux-gnu.so
案例分析:pybullet-planning中的ikfast编译件

我们考察如何将一个新的机械臂添加到pybullet-planning中。
首先考察已有的franka_panda机械臂,文件夹内容如下:

setup.py内容如下:
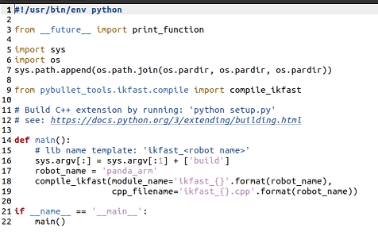
调用的compile文件如下:
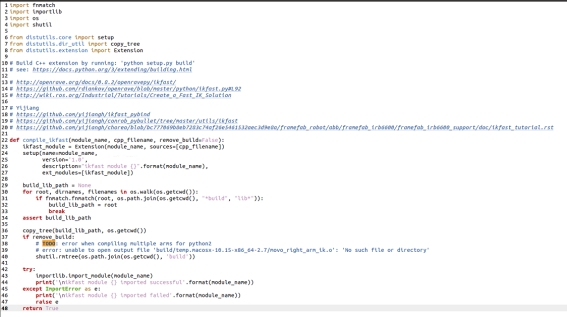
基本上就是传入模块名称和cpp文件的路径,然后构建出一个python可以调用的模块。
同目录的ik.py提供了一个向python暴露的接口,其中的IKFastInfo是一个namedtuple,其实就是指定了我们编译出来的模块名字(setup.py中的robot_name和compile_ikfast中的module_name)
