openGL和openCV中的摄像机参数的转化
本文章的主题为研究openGL和openCV中的摄像机参数的转化。
首先要搞清楚,坐标旋转和坐标系旋转的概念。
坐标旋转(点的运动)

如上图,二维坐标系中的 绕原点逆时针旋转
绕原点逆时针旋转 度,则得到的B点满足:
度,则得到的B点满足:

把上式写成矩阵乘法的形式:
这是点的运动,坐标系(参照系)并没有发生变化
坐标系旋转(基变换)
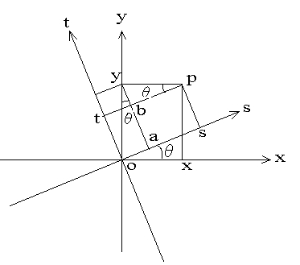
如上图,把原先的xy基逆时针旋转 度到st基,p在xy基下的坐标为
度到st基,p在xy基下的坐标为 ,p在st基下的坐标为
,p在st基下的坐标为 ,求变换关系。
,求变换关系。
我们有
即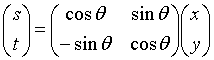
2是坐标系的旋转,点是不动的,得到的是不动的点在变化了的坐标系下的表示
点旋转β相当于坐标系旋转了-β。所以可以直接在1的基础上,把角度反转,就成了坐标系的旋转。
基变换和坐标变换
平面解析几何中的直角坐标系有时候需要坐旋转,这实际上是坐标向量 绕原点坐旋转,设坐标轴逆时针旋转的角度为
绕原点坐旋转,设坐标轴逆时针旋转的角度为 ,那么不难有,新坐标向量
,那么不难有,新坐标向量 和原坐标向量之间的关系为:
和原坐标向量之间的关系为:
OpenCV中的内参矩阵K(计算机视觉——算法和应用P41)
有几种方式来描述上三角矩阵K,一种是
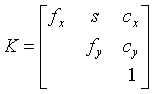
上式使用相互独立的参数来描述x和y维度的焦距 和
和 ,s项刻画任何可能的传感器轴间的倾斜,这由传感器的安装没有与光轴垂直所引起,而
,s项刻画任何可能的传感器轴间的倾斜,这由传感器的安装没有与光轴垂直所引起,而 是以像素坐标表达的光心。
是以像素坐标表达的光心。
在实践中,通过设置 和s=0,在很多应用中会使用如下更简单的形式:
和s=0,在很多应用中会使用如下更简单的形式:
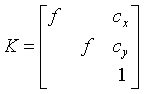
通常情况下,通过将原点大致设置在图像的中心,即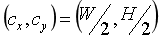 ,其中W和H是图像的高和宽(用像素表示,如600*480),就可以得到仅含一个未知量焦距f的完全可用的摄像机模型。注意上式中的焦距都是以像素为单位表示的,要与现实相机中的毫米焦距等区分开来。
,其中W和H是图像的高和宽(用像素表示,如600*480),就可以得到仅含一个未知量焦距f的完全可用的摄像机模型。注意上式中的焦距都是以像素为单位表示的,要与现实相机中的毫米焦距等区分开来。
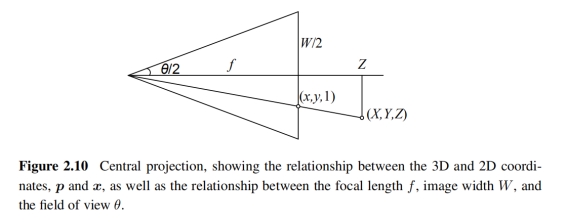
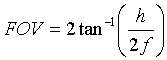
要转化到现实中的距离,我们首先需要知道图像的现实宽度 ,如
,如 ,然后我们可以通过公式:
,然后我们可以通过公式: ,这里的
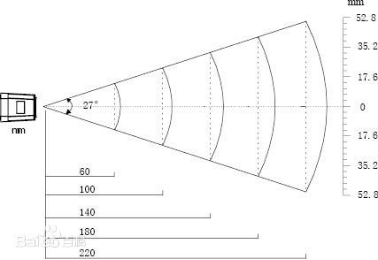
,这里的 就是视场角,也就是FOV,下图就展示了一个
就是视场角,也就是FOV,下图就展示了一个 的情况。
的情况。
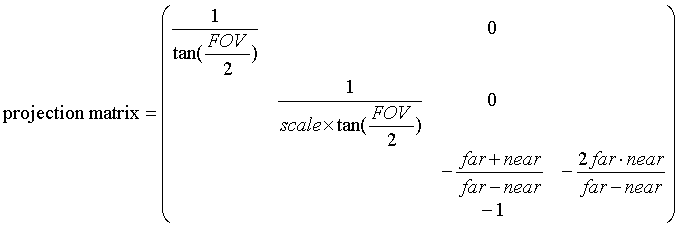
为了更好地理解OpenGL中的透视投影,我们先来讨论函数glFrustum。根据OpenGL的官方文档,“glFrustum描述了一个透视矩阵,提供了一个透视投影。”这句话没错,但是只说出了一半实情。事实上,glFrustum做了两件事情,首先它进行透视投影,然后它把结果转换到归一化设备坐标系(NDC)上。前者是投影几何中的常规操作,但是后者是OpenGL中特有的实现细节。
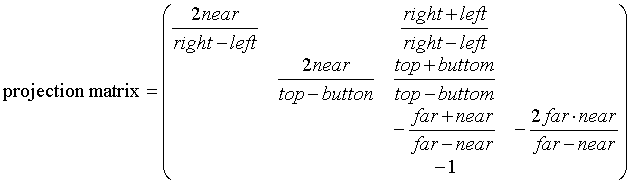
为了讲明白这件事情,我们需要把投影矩阵(Projection Matrix)分成两部分,也就是透视矩阵(Prespective Matrix)和NDC矩阵。

我们的相机内参矩阵可以描述透视投影,所以它是求解出Perspective Matrix的关键。而对于NDC矩阵,我们会使用OpenGL的glOrtho。
第一步:投影变换
我们的3x3内参矩阵K为了能在OpenGL中使用需要两个小的变更,一个是为了正确的裁剪,位置3,3的元素必须为-1,因为OpenGL的摄像机是从原点向z的负半轴看的,所以如果位置3,3的元素为正,摄像机前方的顶点在投影后将具有负的w坐标。原则上,这是可以的,但是由于 OpenGL 执行裁剪的方式,所有这些点都会被裁剪。
所以我们现在有了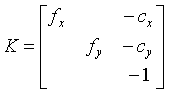
对于第二个更改,我们需要保护失去的Z轴的深度信息,所以我们会在内参矩阵的基础上添加一行和一列,即:
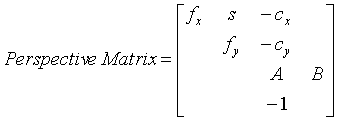 ,其中
,其中
新的第三行保持了Z值的顺序的同时,把-near和-far映射到它们自己(在归一化了w后)。这个结果就是在裁剪平面之间的点依旧在乘上了Perspective Matrix后依旧保持在裁剪平面之间。
第二步:变换到NDC
NDC矩阵可以通过glOrtho函数提供。Perspective Matrix把一个视锥空间转化为了一个长方体空间,而glOrtho把长方体空间转化为归一化设备空间。
调用glOrtho需要六个参数left,right,bottom,top,near,far
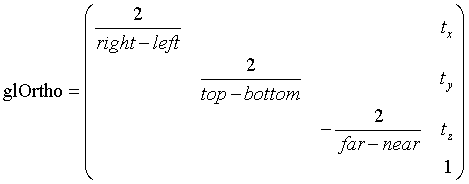 ,其中
,其中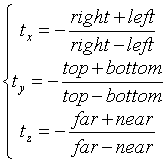
调用它的时候,far和near就和前述的一样。而top,bottom,left,right的裁剪平面的选取对应原图像的维度和标定时的坐标规范。
举个例子,如果你的摄像机用WxH的左上角为零点的图像标定了,那么就该使用left = 0, right = W, bottom = H, top = 0,注意到H作为了bottom参数而0作为了top参数,这意味着y轴正半轴是向下的规范。
如果标定时使用的是y轴向上的坐标系,并且原点在图像中心的话,那么就是left = -W/2, right = W/2, bottom = -H/2, top = H/2.
注意到其实glOrtho的参数和透视矩阵有很大的关系,比如说把视景体(viewing volume)向左平移X等价于把主轴向右平移X。而让 翻倍就等于让left和right参数减半。很明显,用这两个矩阵来描述这个投影是冗余的,但是分别去考察这两个矩阵允许我们分离相机几何学和图像几何学。
翻倍就等于让left和right参数减半。很明显,用这两个矩阵来描述这个投影是冗余的,但是分别去考察这两个矩阵允许我们分离相机几何学和图像几何学。
根据文献
在pybullet中,
内参矩阵K为: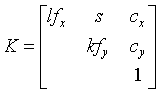
 和
和 是光心,通常是图像中心。不过有以下不同,
是光心,通常是图像中心。不过有以下不同,
\1. 维度,pybullet保持了第三行和第四列来保持深度信息,这和之前提到的OpenGL相机相同。
\2. 第四行第三列的元素不是1而是-1
\3. Pybullet中s=0
\4. Pybullet中
首先,pybullet使用OpenGL,所以它使用的是列优先的顺序,所以从pybullet中读到的真正的projection matrix应当转置,或者使用numpyarray的order=’F’。
其次,把FOV转化为f的方程如下:
 和
和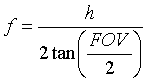
因此,pybullet把焦距乘以了2/h,这是因为Pybullet使用归一化设备坐标系(也就是对x除以图像宽度,来归一化到01,再乘以2到02,所以如果我们的光心在图像中间x=1的位置时,那么裁剪平面就归一化到了-1~1)。因此,pybullet的焦距是使用NDC下的正确的焦距长度。
在内参矩阵K中,k和l是mm/px的比例,在使用pybullet时,我们可以认为k=l=1 mm/px,换句话说,在pybullet形式的内参矩阵中, 和
和 是以像素为单位的,而整个矩阵的每个元素都是以mm为单位的。
是以像素为单位的,而整个矩阵的每个元素都是以mm为单位的。
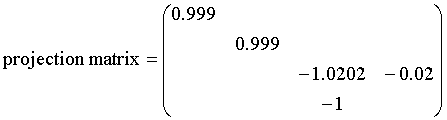
考虑到以上的所有条件,在pybullet中,内参矩阵为:
 ,其中
,其中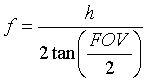
把h=1000和FOV=90代入,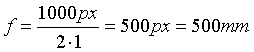
def computeProjectionMatrixFOV(*args, **kwargs): # real signature unknown
“”” Compute a camera projection matrix from fov, aspect ratio, near, far values “””
pass
def computeViewMatrix(*args, **kwargs): # real signature unknown
“”” Compute a camera viewmatrix from camera eye, target position and up vector “””
pass
http://ksimek.github.io/2013/06/03/calibrated_cameras_in_opengl/
https://amytabb.com/ts/2019_06_28/#conversion-corner-1
http://www.info.hiroshima-cu.ac.jp/~miyazaki/knowledge/teche0092.html
openGL和openCV中的摄像机参数的转化
https://kami-code.com/2021/10/15/opencv-opengl-camera-conversion/