MoveIt Configuration
在配置ROS-noetic MoveIt的时候,不可避免地遇到了一些问题。在此记录一下。
官网配置教程地址:
https://ros-planning.github.io/moveit_tutorials/doc/getting_started/getting_started.html
Catkin是ROS官方的构建编译系统,是原先的ROS编译构建系统rosbuild的继承者,它组合了cmake宏和python脚本来在基本的cmake工作流之上提供一些额外的功能。Catkin设计得比rosbuild更加便捷,允许更好地分配package,支持更好的交叉编译以及更好的便捷性。Catkin的工作流和cmake的工作流很像,但是还添加了自动find package的基础结构,并且在同时构建多个相互依赖的项目。
catkin编译的工作流程如下:
首先在工作空间catkin_ws/src/下递归的查找其中每一个ROS的package。package中会有package.xml和CMakeLists.txt文件,Catkin(CMake)编译系统依据CMakeLists.txt文件,从而生成makefiles(放在catkin_ws/build/)。
然后make刚刚生成的makefiles等文件,编译链接生成可执行文件(放在catkin_ws/devel)也就是说,Catkin就是将cmake与make指令做了一个封装从而完成整个编译过程的工具。catkin有比较突出的优点,主要是:
1.操作更加简单
2.一次配置,多次使用
3.跨依赖项目编译
使用catkin_make进行编译
1 | $ cd ~/catkin_ws #回到工作空间,catkin_make必须在工作空间下执行 |
编译完成后,如果有新的目标文件产生(原来没有),那么一般紧跟着要source刷新环境,使得系统能够找到刚才编译生成的ROS可执行文件。这个细节比较容易遗漏,致使后面出现可执行文件无法打开等错误。
第一次catkin build的时候,我们遇到如下错误:

根据回答,我们修改原先的catkin_build指令,修改为catkin build -DPYTHON_EXECUTABLE=/usr/bin/python3 -DPYTHON_INCLUDE_DIR=/usr/include/python3.7m。换句话说,ROS的catkin默认的是用python2.7去编译的,哪怕我们安装了python3-empy它依然报错。告诉它使用python3后这个报错就解决了。

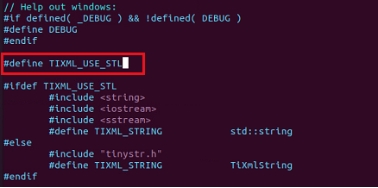
第二个问题是tinyxml.h找不到tinystr.h文件。我们找到对应位置后在源码中添加TIXML_USE_STL即可解决这个问题,使用标准的STL库来代替tinystr.h。
第三处build的问题是

它提示我们找不到pyconfig.h,根据这篇博客的提示,我先使用sudo find / -name pyconfig.h,发现在路径/usr/include/python3.8下存在pyconfig.h,原来是解决问题1的时候复制的路径/usr/include/python3.7m根本不存在,把命令改为
1 | catkin build -DPYTHON_EXECUTABLE=/usr/bin/python3 -DPYTHON_INCLUDE_DIR=/usr/include/python3.8 |
即可正常编译成功。
接下来我们使用命令
1 | roslaunch panda_moveit_config demo.launch rviz_tutorial:=true |
这里会再次遇到一个问题,根据此回答即可解决。
自此我们可以正常运行并且看到Rviz界面,添加MotionPlanning后就可以在RViz界面中见到我们的panda机器人。
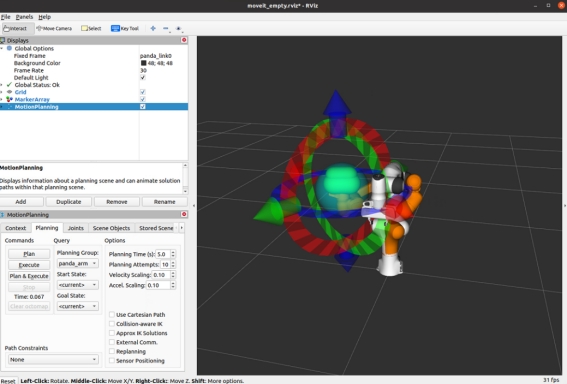
我们首先需要知道4种重叠的可视化:
robot在planning environment中的configuration(各个关节的当前角度)。
robot的plan出来的路径
绿色:robot motion planning的开始状态
橙色:robot motion planning的结束状态
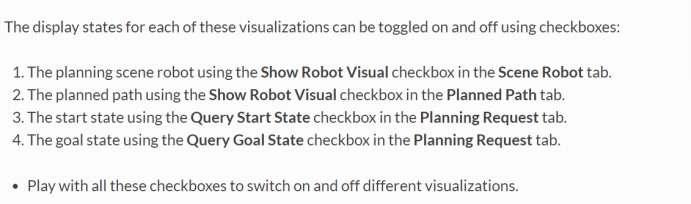
这些展示的状态可以在上面的motionplanning的下拉框中勾选。Planning scene在show robot visual->Scene Robot中;planning path在show robot visual->Planned Path中;开始状态在Query Start State->Planning Request中;结束状态的设置在Query Start State->Planning Request。
我们可以拖动各个关节的orientation来设置开始状态和结束状态。然后点击plan可以查看整个的运动轨迹。我们勾选use collision-aware IK就可以使得求解器尝试找到一个collision-free的轨迹;如果没有勾选的话,求解器会允许在过程中碰到collision。不过在可视化的时候,存在碰撞的link无论我们有没有勾选use collision-aware IK,都会被标识成红色。
在MotionPlanning的joint窗口下,我们可以拖动nullspace exploration,可以看到在末端执行器的位姿不变的情况下,其他机械臂的configuration是可以变化的(满足连续关系)。
现在我们可以开始使用panda机器人在moveit rviz插件中进行运动规划。步骤如下:
把start state设置到期望的位置
把goal state设置到期望的位置
确保这两个state都没有自己和自己碰撞
确保planned path是可见的
按下plan键。
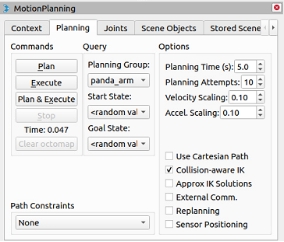
我们在Planning窗口中可以选择不同的start和goal states,eg:当前的状态,之前的状态(之前的planning attempt的start state),一个随机采样的configuration,一个有名字的在srdf中定义的state。
我们也可以查看轨迹路径点,只需要在导航栏中打开panels->motionplanning-slider,即可看到对应的路径点并拖动。

如果我们勾选use cartesian path的话,robot会尝试直线地移动end effector。
[1]Catkin工作原理 https://blog.csdn.net/qq_33876441/article/details/102958248
[2]Catkin conceptual http://wiki.ros.org/catkin/conceptual_overview
MoveIt Configuration